近日,上海大学机自学院机械自动化工程系李静、沈南燕团队在工业机器人领域的研究成果“A Novel Inverse Kinematics Method for 6-DOF Robots with Non-Spherical Wrist”在SCI一区(工程:机械)TOP期刊《Mechanism and Machine Theory》(MMT,CS=6.5,IF=3.312)上公开发表,上海大学为论文第一单位,李静老师为论文第一作者,沈南燕老师为通讯作者,研究生余泓为论文第二作者。
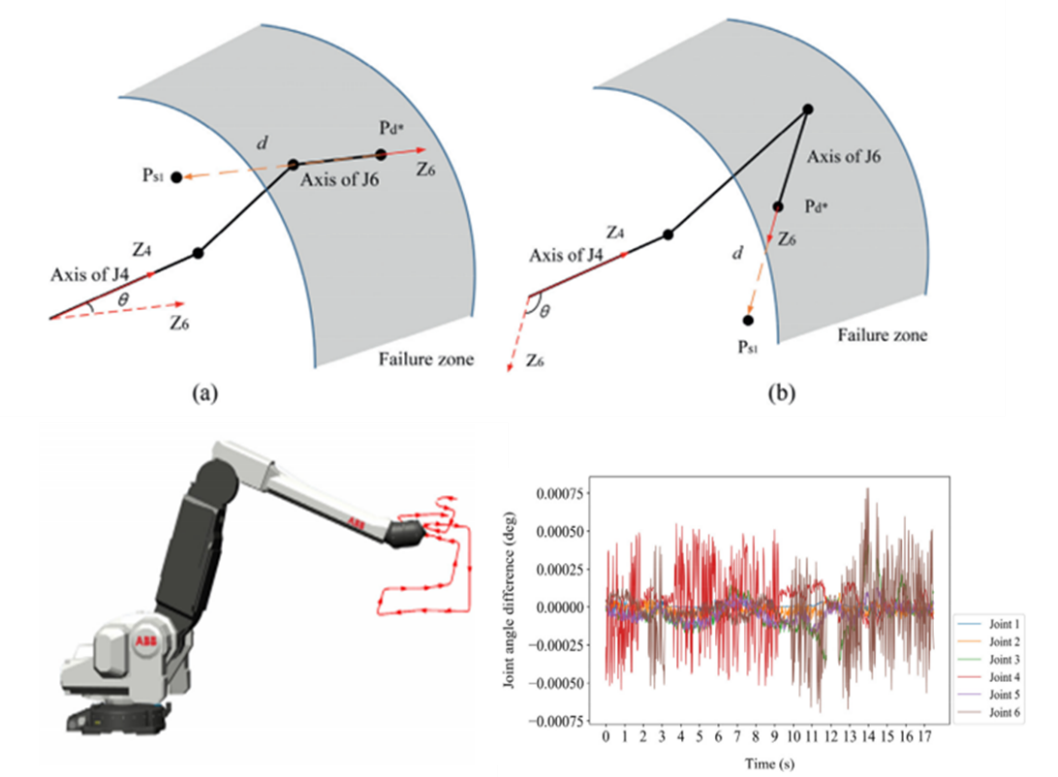
文章中,作者针对非球形手腕6自由度机器人逆运动学提出了一种新的数值求解方法。该方法首先将非球形手腕结构简化为球形手腕结构,在每轮迭代过程中,利用简化机构的逆解计算实际机构的末端位姿和目标位姿的误差,然后将该误差补偿到末端位姿上,基于此可逐步获得期望的逆解值。此外,文中针对由于结构简化造成的运动空间减小而导致算法可能失效的问题进行了分析和讨论,通过偏移末端位置以提高算法健壮性的方法。文章最后利用该方法求解了两类典型机器人的逆解,与传统的数值迭代方法Newton-Raphson算法进行对比实验,实验结果证明了文章所提出的新方法的有效性和优越性;计算连续轨迹逆解的实验证明了本文算法的实用性。
文章链接:https://doi.org/10.1016/j.mechmachtheory.2020.104180