近日,机自学院田应仲、李龙团队在柔性机器人领域的最新研究成果“Triboelectric Nanogenerator Sensor for Soft Robotics Aiming at Digital Twin Applications”在综合性顶级期刊《Nature Communications》上发表,这也是我校机器人领域研究成果首次在该刊物上发表。论文基于摩擦纳米发电机(TENG)设计柔性手指的形态与触/滑觉柔性传感器,融合多传感信息通过机器学习识别抓取物体,并利用数字孪生技术构建面向未来智慧工厂的智能分拣系统。
柔性机器人具有共融性好、自由度高、工作灵活等优点,是机器人研究的前沿热点。但由于高柔顺性和非线性,其自身形态与接触信息感知一直是柔性机器人领域的研究难点,限制其应用与发展。自2012年快速发展起来的摩擦纳米发电机(TENG)技术因取材广泛、成本低廉,结构适应性好等优点,在能量收集和自供能传感领域应用前景广阔。通过选用柔性摩擦材料并设计传感器件结构,可以很好地适应柔性机器人的高柔顺大变形,实现其形态与触觉信息感知。
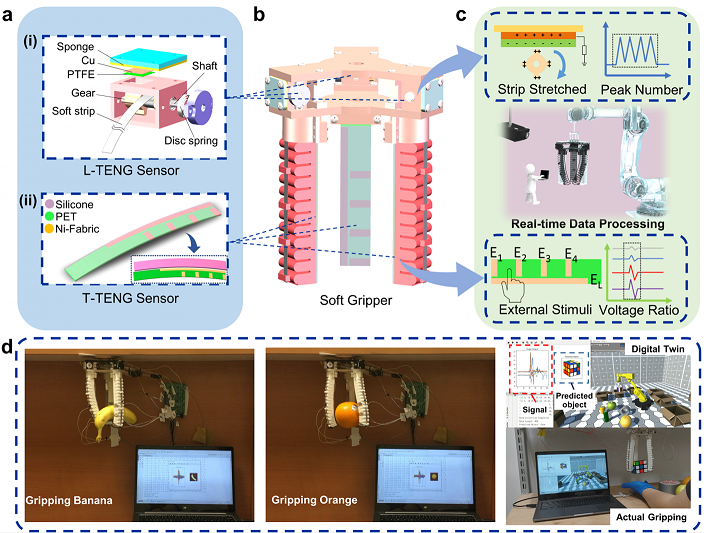
在本论文中,研究团队基于齿轮灵感设计了一种TENG长度传感器,为检测柔性手指弯曲形态提供了一种低成本、高可靠、自供能的传感方案;通过在柔性基底上布置5个形态不同的电极设计了TENG触/滑觉传感器,用于检测接触位置、面积和滑觉信息。将上述TENG传感器件集成到3D打印的柔性手上并开展抓取训练,优化学习模型,基于机器学习融合多传感信息实现准确、高效的物体识别。基于数字孪生技术将实时感知与识别数据映射到数字空间中,驱动孪生模型进行智能分拣。该研究结果为TENG传感和柔性机器人形态与触觉感知等相关领域研究提供了新思路,也为柔性机器人在多维信息融合的智能制造中应用提供了一种全新的解决方案。
本研究工作由上海大学田应仲、李龙团队,新加坡国立大学李正国教授团队,哈尔滨工业大学邓宗全院士团队,以及苏州大学孙立宁教授团队通力合作完成,上海大学为第一署名单位。上海大学19级博士生金滔和李龙老师为论文共同第一作者,上海大学田应仲老师、哈尔滨工业大学侯绪研教授以及新国大李正国教授为论文共同通讯作者。同时,上海大学张泉、袁光杰老师,苏州大学陈涛教授都参与了论文的研究工作,上海市智能制造及机器人重点实验室对研究工作给予了大力支持。在本论文基础上,研究团队将继续深入研究,持续推动柔性机器人、柔性感知及智能结构方面研究工作的不断深入。
文章链接:
https://doi.org/10.1038/s41467-020-19059-3